Corporation Park

The Find Your Way project is an initiative to get more disadvantaged and hard-to-reach communities involved with orienteering. Pendle Forest Orienteers are actively engaging with it and are keen to get new maps made to support the project, particularly in places where there traditionally are not so many orienteers. The reached out to me about mapping Corporation Park, in Blackburn, a classic Victorian park on a slope, sometimes quite steep, with a good amount of detail. It would be a sprint specification map, at 1:4000, and although usually sprint maps use 2.5m contours, I decided a 5m interval would work better here due to the steep slopes.
I started with LiDAR data, which I processed with OCAD for the first time. I didn't use OCAD's auto-smoothing, I left them un-smoothed and then traced roughly over the top of every 5th contour myself, trying to interpret the surrounding LiDAR contours too and combine the information into one contour. Where there was more detail than could be shown with a single contour, form lines were used. Then I made a decent base map using OS MasterMaps, pieced together from screenshots from the Blackburn Council website. This is a decent way to get them for free, and British Orienteering have a license agreement with OS for using their maps as base maps.
I had to wait a while to do the fieldwork due to the snow and ice in mid-January, but eventually made it out to Blackburn, using the OpenOrienteering Mapper app to do my fieldwork. I used a pen lid as a stylus which worked well, particularly as I could use it with gloves on!
The trickiest part of the fieldwork was the vegetation. Bushes and undergrowth in woodland can't be seen on a satellite picture so you have to judge their size and shape by walking round and looking at them from a few different angles. And even then, it requires defining exactly where the boundary is, which can be tricky for a vague light green or mid-green transition.
The base map was pretty good for all the paths and buildings, but a few of the lines were still ambiguous. I'd marked down vegetation boundaries, some of which existed and some of which didn't, and solid lines were sometimes fences, sometimes walls, sometimes crossable, sometimes not.


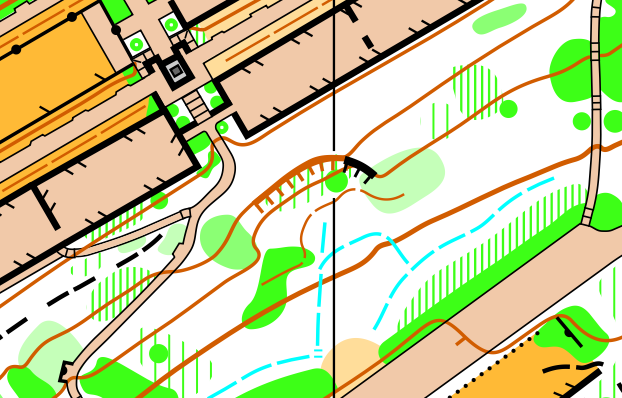
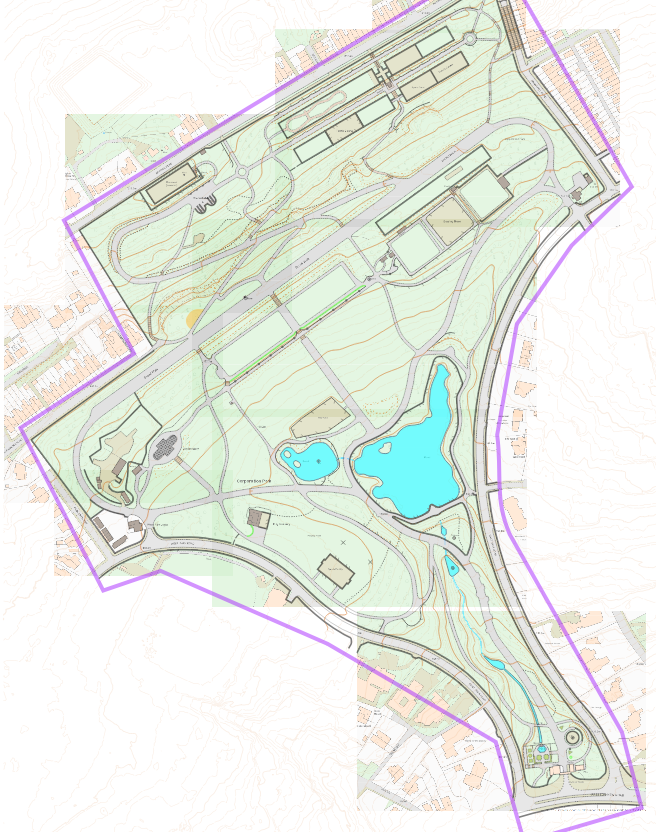
Comparing the two pictures above, you can see that some of the vegetation boundaries were marked quite accurately, such as in the North-East corner and near the statue. North-East of the lake you can see the base map shows a solid line, which indeed was an uncrossable fence, and the ends were accurate. On the edges of the tarmac path, in the South-East corner, you can see two of the insets (which generally have benches in) didn't exist, or perhaps had been removed recently, so you do have to be careful.
One slightly annoying thing about using the OOM app is that you can't make a super neat and tidy map, because you can't snap new objects onto the boundaries of existing objects like you can on a computer. Often you can make things tidy by overlapping one into the other and remembering which will be 'on top'. For example, an area of yellow sits under a paved area, so if you overlap yellow into a paved area you'll get a neat boundary, without having to draw if perfectly along the edge. In the end, I still spent a couple of hours at home afterwards tidying up all the bits where this isn't possible.
The last few things I did were adding north lines, a legend, and making sure everything obeys the minimum size and gap limits, as specified by the IOF's specification. I had to make a few adjustments - for example a few thickets too small and a few line features shorter than the minimum lengths. There are probably a few little things left too - always room for improvement!
